Методы синтеза интеллектуальной информационной технологии мониторинга, прогноза и управления ресурсами и реконфигурацией многофункциональных группировок динамических объектов наземного и космического базирования
- Завершена разработка объектно-ориентированной спецификации, которая была положена в основу четырёх подсистем территориально-распределенного имитационно-моделирующего стенда: экспериментальный образец программного модуля (ЭО ПМ) планирования и реализации стратегий внутренней и внешней реконфигурации многофункциональной группировки динамических объектов наземного и космического базирования (МГДО НКБ), ЭО МП формирования пользовательского интерфейса, ЭО ПМ асинхронного обмена сообщениями, ЭО комплекса полунатурных моделей наземно-космических роботов. Использование единой спецификации в разнородных подсистемах позволило конструктивно согласовать концепты логико-динамических моделей и концепты проблемно- ориентированного языка обучения робота. Исследование работоспособности ЭО ПМ показало высокий уровень отказоустойчивости системы за счёт многоступенчатого контроля целостности системы. Контроль состояния ЭО ПМ обеспечивается службами операционной системы (systemd). Контроль РТК ведётся соответствующим ЭО ПМ по данным обобщённой телеметрии. Контроль взаимодействия подсистем осуществляется на прикладном уровне в ЭО ПМ (компенсирующая логика работы модуля), на уровне представления, сеансов и транспорта в сервисной шине (компенсирующие действия в BPMN процессах), на нижних уровнях – сетевыми службами.
- Разработанная исполнителями настоящего проекта сервисная шина подверглась значительной модернизации в части работы по простым протоколам SNMP и MQTT с автономными контроллерами с сенсорами и исполнительными устройствами, установленными на робототехнических комплексах. При этом ЭО ПМ регистрации сервисов и маршрутизации запросов модернизировано и переведено с фиксированых адресов сервисов на технологию косвенных конечных точек (Indirect Endpoints). Для снижения высокого риска отказа выполнения заданного сценария работы добавлены отказоустойчивые точки подключения сервисов (Failover Endpoints). Суть проведённой модернизации заключается в создании нескольких экземпляров каждого сервиса и объединении их в отказоустойчивую группу (Failover Group). Сервисная шина автоматически отслеживает выполнение операций и в случае сбоя перенаправляет запрос к следующей точке подключения в группе. Таким образом, при работе в территориально распределённой гетерогенной среде с неустойчивым каналом связи существенно повышается надёжность работы созданного имитационно-моделирующего стенда, в отличие от традиционных протоколов openSAFETY или POWERLINK, акцентирующих внимание на скорости взаимодействия в широкополосных сетях.
- Проведённые расчёты планов совместного функционирования РТК с применением оптимизационных и эвристических алгоритмов показали следующие результаты: эффект от применения оптимизационных алгоритмов увеличивается при росте числа конфликтов операций за ресурс, то есть, ситуаций, в которых необходимо проводить обоснованный выбор операции из списка допустимых. При двух технологических процессах (низкая конфликтность) обобщённый показатель качества синтезированного плана работы улучшился до отметки 16,2%. При трёх процессах улучшение обобщённого показателя качества достигло 27,4%. Аналогичное решение для четырёх процессов дало улучшение на 35,4%. При дальнейшем увеличении количества производственных процессов результат незначительно колеблется, но остаётся на уровне 30 – 38%. Полученные результаты подтверждают целесообразность применения оптимизационных алгоритмов при высокой степени конфликтности технологического процесса.
- Разработана методика многокритериального оценивания эффективности применения интеллектуальных информационных технологий (ИИТ) для динамического управления МГДО НКБ в сложных условиях обстановки и выбора из них наиболее предпочтительных, базирующаяся на предложенном оригинальном комплексе детерминированных, стохастических и интервальных логико-динамических моделей проактивного управления МГДО НКБ и позволяющая, во-первых, на единой методологической и модельно-алгоритмической основе проводить совместную постановку и решение как задач комплексного моделирования функционирования МГДО НКБ в динамически изменяющейся обстановки, так и задач одновременного синтеза технологий и программ (планов) управления операциями, потоками, ресурсами МГДО НКБ, а также коррекции (перепланирования) указанных программ, и, во-вторых, осуществлять решение задач оценивания информационно-технологических возможностей, робастности и устойчивости соответствующих планов при анализе их реализуемости. Сама методика включает в себя две основные фазы (этапа): на первой фазе должно осуществляться формирование (генерирование) допустимых вариантов многоструктурных макросостояний МГДО НКБ или, говоря другими словами, должен проводиться структурно- функциональный синтез нового облика МГДО НКБ, соответствующего складывающейся (прогнозируемой) обстановке. Для рассматриваемого класса задач многокритериального оценивания эффективности использования ИИТ, в результате реализации первой фазы, в пространстве многоструктурных макросостояний формируется множество Парето (множество недоминируемых многоструктурных макросостояний), обеспечивающих выполнение поставленных перед МГДО НКБ задач на фиксированном интервале времени. На второй фазе производится решение задач выбора наиболее предпочтительной программы проактивного управления структурной динамики МГДО НКБ, траектория которой в многомерном фазовом пространстве попадает в одну из точек множества Парето многоструктурных макросостояний, сформированном на первой фазе, обеспечивая тем самым, решение исходной задачи многокритериального оценивания и выбора наиболее предпочтительных технологий и программ проактивного управления МГДО НКБ и соответствующих ИИТ, обеспечивающих их успешную реализацию. В результате исследований показано, что данная методика после незначительных модификаций можно использовать при решении задач формирования рекомендаций по реконфигурации структур программно-математического и информационного обеспечения, систем управления реконфигурируемых МГДО в динамически изменяющейся среде ( в том числе при возникновении расчетных и нерасчетных нештатных ситуаций).
- Были выполнены модификация и обобщение ранее разработанного метода выбора вспомогательных критериев при управлении МГДО НКБ с помощью обучения с подкреплением. Полученная версия метода, способная управлять оптимизацией с использованием нескольких эвристик локального поиска, была применена для решения задачи маршрутизации МГДО НКБ с учетом временных интервалов, имеющей пять целевых и семь вспомогательных критериев оптимизации. Результаты экспериментальных исследований показали, что нахождение лучших решений этой задачи с необходимостью требует использования многостадийного процесса оптимизации, вовлекающего более одной эвристики и более одного критерия. Было также выявлено статистически значимое преимущество использования метода переноса результатов обучения, осуществляемого путем использования усредненных Q-значений, полученных на предыдущих запусках алгоритма, в качестве начальных значений для следующего запуска.
- Проведена коррекция состава и структуры нетиповых операторов языка управления робота, базовая часть которых определяет закон перемещения робота (она формируется в процессе обучения), а также коррекция их функций была осуществлена за счет включения в состав операторов обширного класса «силовых операторов». Они определяют силу взаимодействия рабочего инструмента робота с объектами, возможные перемещения которых ограничены голомными связями. Это кардинально расширяет функциональные возможности дистанционно- управляемых космических роботов, позволяя использовать их для выполнения сборочных операций, которые в настоящее время наиболее востребованы при проведении работ в Космосе. Коррекция структуры и состава типовых операторов языка управления робота, была выполнена за счет включения в состав языка операторов условного и безусловного переходов, операторов цикла и других подобных операторов, не влияющих на перемещения робота, а также за счет включения в состав языка операторов, задающих положение робота в системе координат его корпуса, что позволяет успешно выполнять соответствующие операции независимо от возможных изменений внешней среды, а также неточности модели среды.
- Экспериментально подтверждена возможность обучения робота показом рабочих операций свободными движениями головы и руки человека-оператора с достоверным контролем результатов обучения на основе фрейм- структурированной модели формы движений (МФД). Язык описания, используемый в МФД, представляет собой многоуровневую, иерархическую систему фреймов, содержащих одновременно семантическое описание элементов формы и топологические (метрические) характеристики, а также, методы и процедуры, характерные для выполнения различного типа движений и сценариев поведения. Разработаны алгоритмы анализа естественных движений руки и головы человека-оператора (без использования традиционных скелетонов), позволяющие автоматически получать семантические описания формы движений в виде многоуровневой системы фреймов МФД. Разработаны и экспериментально проверены алгоритмы обучения методом показа рабочих операций для группы телеуправляемых роботов-ассистентов, в том числе с использованием 6-ти координатной рукоятки управления. Экспериментально исследовались методы и алгоритмы группового обучения и телеуправления рабочими операциями и сценариями поведения роботами, передачи функций в группе и пространственной реконфигурации группы. Экспериментально проверена эффективность разработанных алгоритмов обучения и коррекции сценариев и рабочих операций при телеуправлении МГДО в условиях помех и задержек сигналов сети Интернет
- Проведено компьютерное исследование процессов и оценивание точностных показателей (характеристик) систем силомоментного управления при выполнении роботом операций сборки и других контактных операций. Компьютерное исследование систем силомоментного управления выполнено при помощи инструментов пакета MATLAB. Выбор данной среды обусловлен наличием графических средств для высококачественной анимации перемещений робота и задающего механизма.При помощи функций библиотеки Robotics Toolbox в пакете MATLAB разработана программа для создания анимационных моделей задающей рукоятки и робота для систем полуавтоматического позиционно-силового управления. Создан специальный файл с программой – Sim_Open_and_Closed_Force_Control_Systems_with_Torque_Drives. Рассмотрены 3 варианта перемещения рукоятки. Проводимое исследование на данный момент позволяет получить оценку точности работы человека-оператора как путем визуального сравнения программируемого и реального положения робота и рукоятки, так и с помощью построения графиков для получения точных значений ошибок.
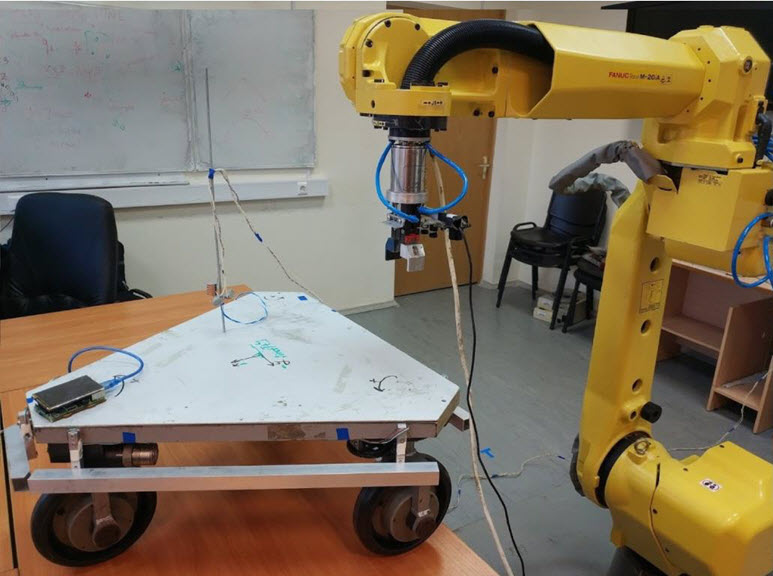
- Разработан территориально-распределенный имитационно-моделирующий стенд состоящий из трёх основных частей: экспериментального робототехнического комплекса, включающего систему адаптивной локальной корректировки траекторий перемещения роботов; экспериментальное программно-математическое обеспечение имитационно-моделирующего комплекса, включающее модули решения задач контроля состояния МГДО НКБ, формирования навигационно-баллистических данных, аналитико-имитационного моделирования для многокритериального оценивания эффективности использования существующих и перспективных ИТ при управлении МГДО НКБ, планирования и реализации стратегий внутренней и внешней реконфигурации МГДО НКБ; экспериментальный робототехнический комплекс, включающий телеуправляемых роботов ассистентов, обучаемых методом показа движений оператором, а также виртуального (компьютерного) робота.
Сроки выполнения:
2016-2018
Заказчик:
Проект выполняется при финансовой поддержке Российского научного фонда, грант 16-19-00199


